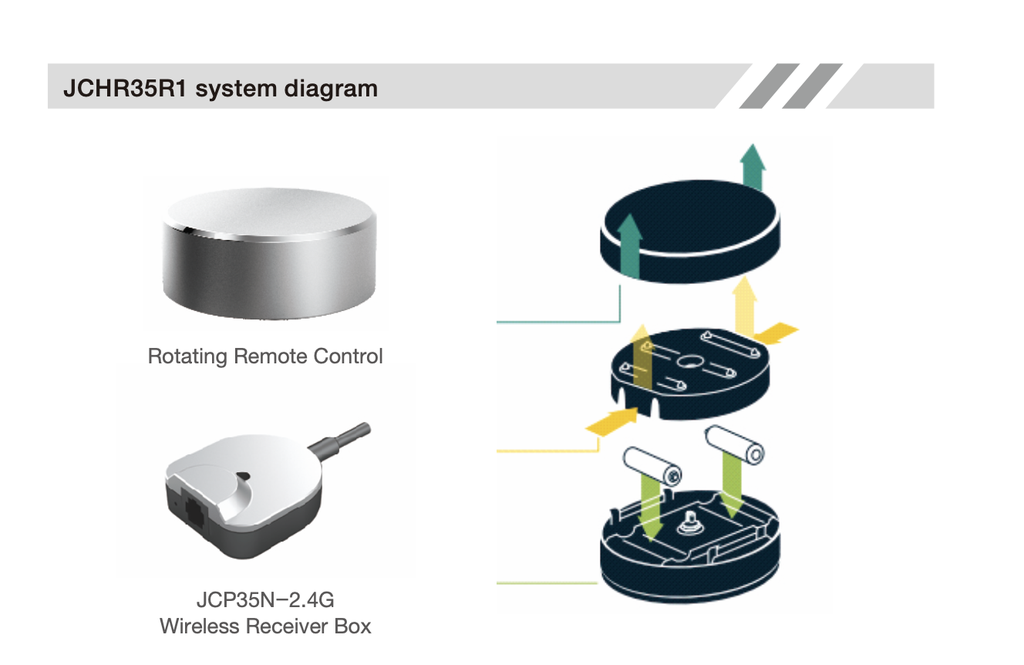
JCH35R1 on langaton, tyylikäs alumiininen käsiohjain.
Yhdistetään 2,4G-vastaanottimeen. Laite toimii pyörittämällä, haluttuun suuntaan ylös ja alas, ja siinä on 2 muistipaikkaa.
Langaton vastaanotin sisältyy pakkaukseen. Patterit eivät sisälly pakkaukseen.
Features
Wireless hand controller with a 5-meter operating radius to 2.4G receiver.
Wireless frequency: 2.4G Hz
Color: Space grey
Material: Aluminum
Memory places: 2
Power source: AAA batteries x 2
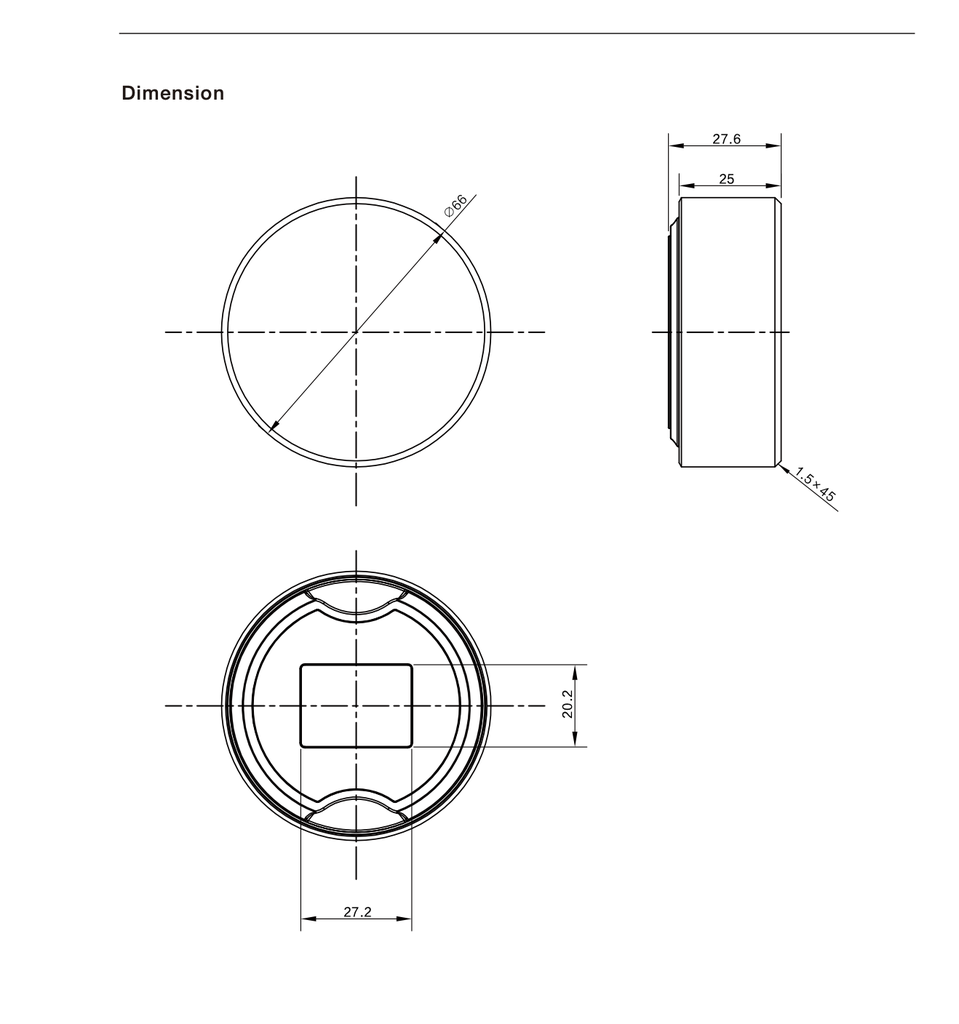
Contoller diameter: Ø 66 mm
Depth: 27,6 mm
Operating environment, temperature: 0~40 ℃ (for indoor use only)
Standby time: 10 kk (long standby time with batteries)
FCC hyväksytty.
Patenoitu tuote.
Activate controller by learning button:
Open the two covers and follow the instructions to install two 3A batteries.
Simultaneously press and hold the learning button inside the remote control (the red button near the battery) and the learning button of the 2.4G wireless receiver box (the button in the hole can be pressed with a needle or a pen tip) for 2 seconds. Until you hear a beep, it means the learning is succesful.
After learning, reinstall the two covers.
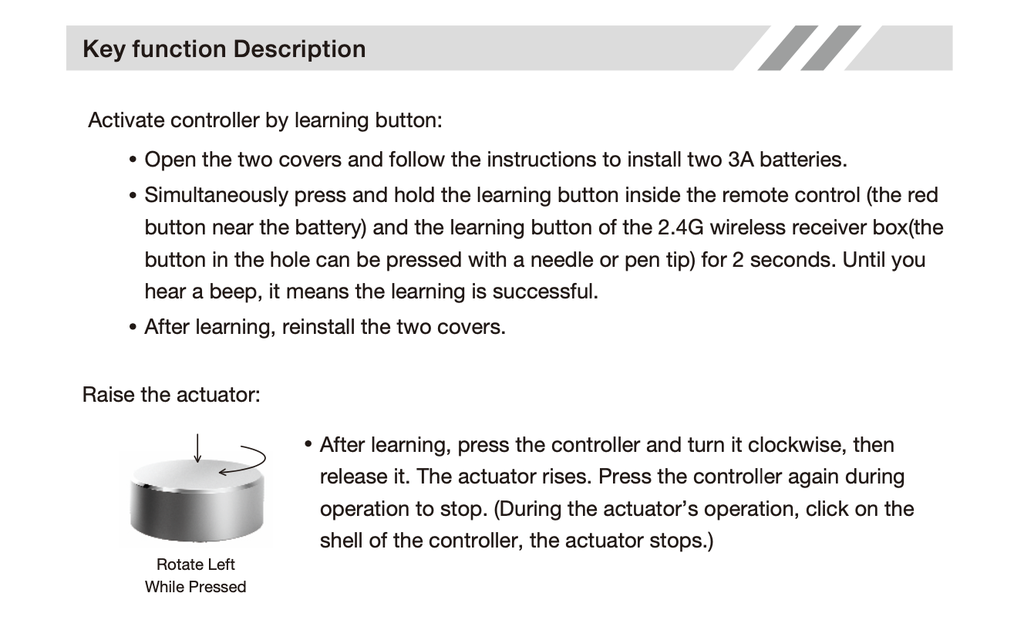
Raise the actuator:
After learning, press the controller and turn it clockwise, then release it. The actuator rises. Press the controller again during operation to stop. (During the actuator's operation, click on the shell of the controller, the actuator stops.
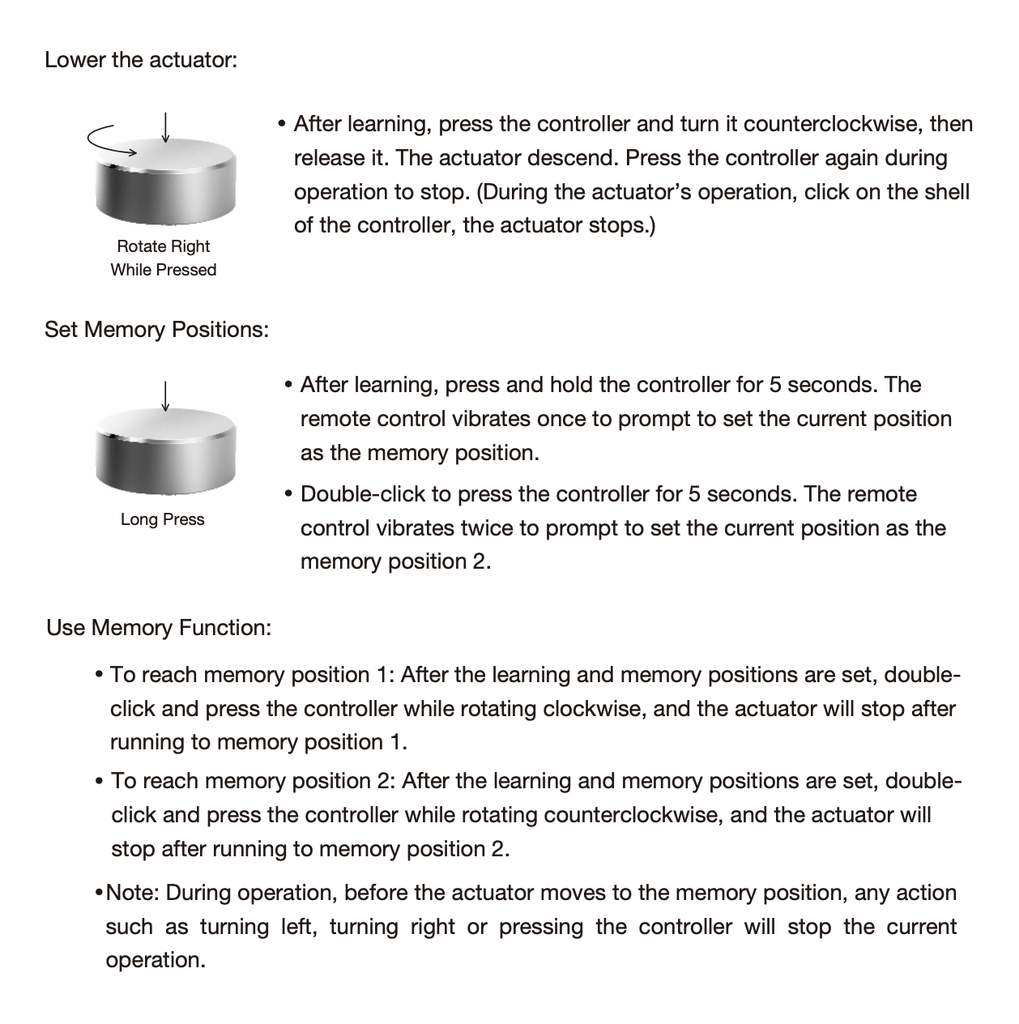
Lower the actuator:
After learning, press the controller and turn it counterclockwise, then release it. The actuator descends. Press the controller again during operation to stop. (During the actuator's operation, click on the shell of the controller, the actuator stops.)
Set memory positions:
After learning, press and hold the controller for 5 seconds. The remote control vibrates once to prompt to set the current position as the memory position.
Double-click to press the controller for 5 seconds. The remote control vibrates twice to prompt to set the current positions as the memory position 2.
Use memory function:
To reach memory position 1: After learning and memory position are set, double-click and press the controller while rotating clockwise, and the actuator will stop after running to memory position 1.
To reach memory position 2: After the learning and memory position are set, double-click and press the controller while rotating counterclockwise, and the actuator will stop after running to memory position 2.
Note!: During operation, before the actuator moves to the memory position, any action such as turning left, turning right or pressing the controller will stop the current operation.
We use cookies to provide you with a better user experience on this website.
Cookie policy